

Energiesparender 24-GHz-Radarsensor für Verkehrssicherheitsbarrieren, Radar zur Personen- und Fahrzeugerkennung
Basisinformation.
| Modell Nr. | RD24-6M |
| Postfixierung | Eingebetteter Typ |
| Grad der Verzerrung | Flexible Barriere |
| Kraftmesser | Rote LED |
| Arbeitsstrom | Arbeitsstrom |
| Empfindlichkeit | 3 Ebenen |
| Relais-Steuerzeit | 1-6s einstellbar |
| Erkennungsanzeige | Grüne LED |
| Betriebstemperatur | -40 °C bis +70 °C |
| Erkennungsgeschwindigkeit | 20–90 ms |
| Relaiskontakt | [email protected]/AC |
| Gehäuse | Abs |
| Erfassungsbereich | 1-6m |
| Ausgangsleistung | <20bm |
| Eingangsspannung | 10-24 VDC |
| Farbe | Schwarz |
| IP-Ebene | IP65 |
| Gewicht | 30g |
| Transportpaket | Karikatur |
| Spezifikation | 11,8 * 9,8 * 2,6 cm |
| Warenzeichen | JUTAI |
| Herkunft | China |
| HS-Code | 8526101090 |
| Produktionskapazität | 5000 Stück/Monat |
Produktbeschreibung
Produktbeschreibung Der Fahrzeugbewegungssensor JUTAI RD24-6M nutzt K-Band-Mikrowellentechnologie, um Personen und Fahrzeuge aus einer Überkopfposition zu erkennen. Es bietet eine große Abdeckung und eine hohe Auflösung zur Aktivierung aller Arten von automatischen Türen, Industrietoren und Verkehrsbarrieren.
Der RD24-6M lässt sich problemlos in einer Höhe von bis zu 6 Metern installieren. Mit seiner vielseitigen mechanischen Ausrichtung gewährleistet der RD24-6M eine genaue Positionierung im erforderlichen Abdeckungsbereich. Die Erkennungsempfindlichkeit und die Bewegungsrichtung (Annähern, Verlassen oder beides) werden durch die Einstellungen des Reset-Schalters programmiert.

1. Bitte wählen Sie einen Netzteilausgang mit 8–40 V Gleichstrom und 1 A.
2. Wenn Sie ein Gate zur Stromversorgung verwenden, stellen Sie bitte sicher, dass der Ausgangsstrom nicht weniger als 200 mA beträgt.
3. Bei der Anwendung auf Fahrspuren beträgt die beste Höhe zwischen der Radarmitte und dem Boden 50–60 cm.
4. Der Abstand zwischen der Mitte des Radars und der Zaunstange beträgt beim achteckigen Zaun mindestens 25 cm und beim rechtwinkligen Zaun mindestens 30 cm.
5. Die Radarinstallationsfläche sollte fest mit dem Boden verbunden und zuverlässig befestigt sein.
6. Der Boden im Erfassungsbereich sollte flach und frei von Hindernissen sein. Wenn der Winkel zwischen dem vorbeifahrenden Fahrzeug und dem Radar mehr als 30 Grad beträgt, errichten Sie bitte Straßensperren, um das Fahrzeug hindurchzuleiten.
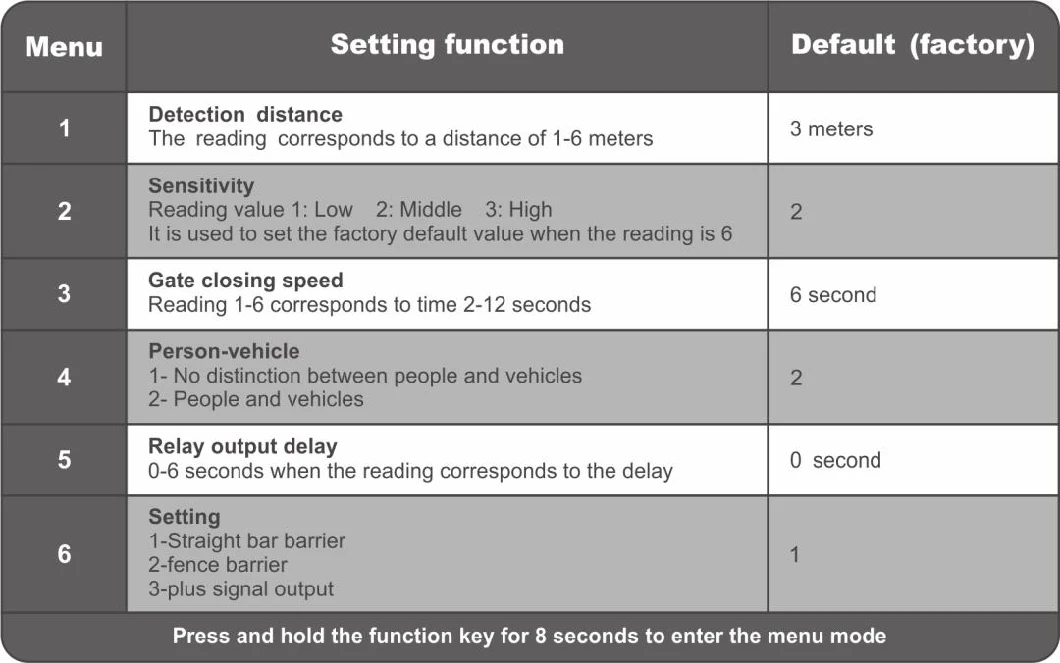
Manuelle Einstellung des Radarwarners RD24-6M
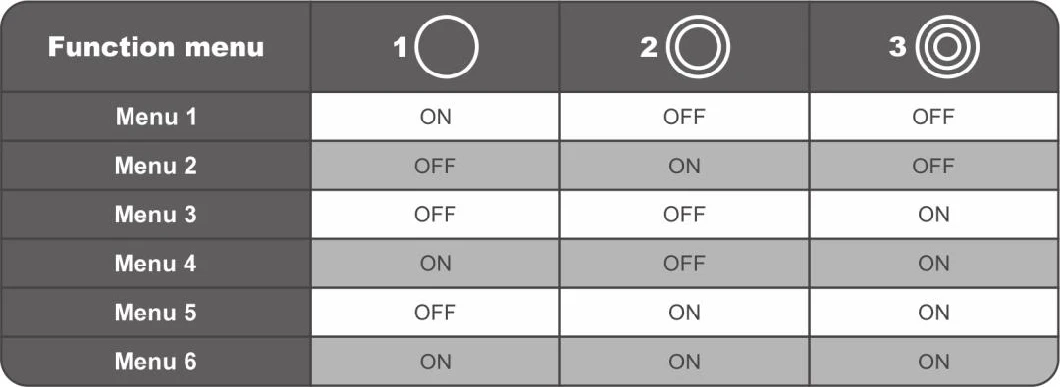
Die Bedeutung der Kontrollleuchte und des Funktionsmenüs (rote LED)
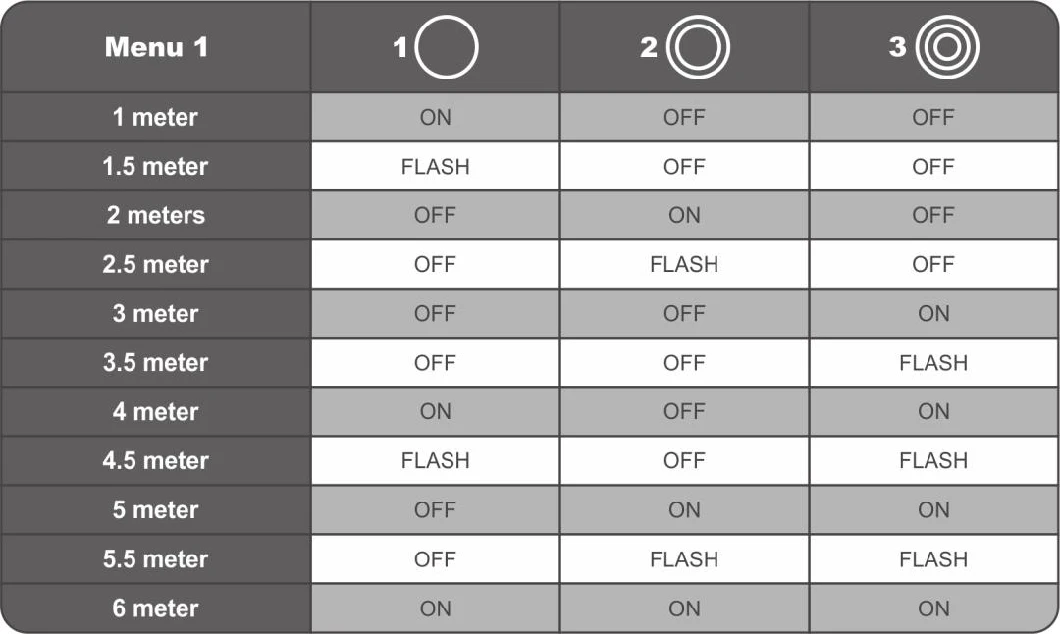
Details zum Inhalt des Erkennungsabstands von Menü 1 (Das Anzeigelicht war die grüne LED. Die Anzeige-LED hat drei Zustände: 1. EIN 2. Blinken 3. Aus)
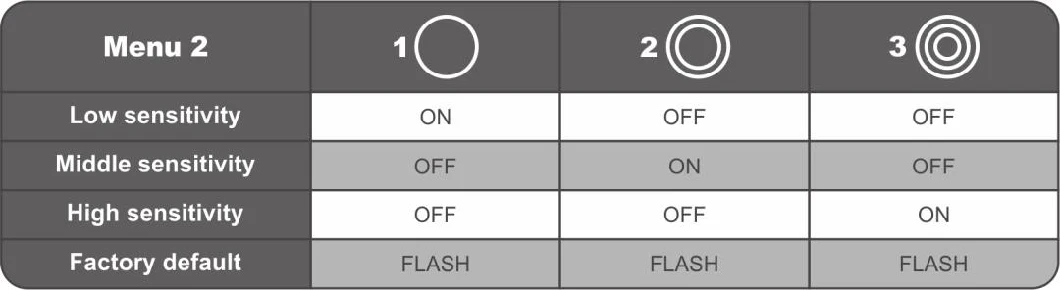
Menü2 Empfindlichkeitsinhaltsdetails (Das Anzeigelicht war die grüne LED. Die Anzeige-LED hat drei Zustände: 1. EIN 2. Blinken 3. Aus)
Menü 3 Details zur Schließgeschwindigkeit (Das Anzeigelicht war die grüne LED. Die Anzeige-LED hat drei Zustände: 1. EIN 2. Blinken 3. Aus)
Zeigt an, dass das Licht die grüne LED war. Die Anzeige-LED hat drei Zustände: 1. EIN 2. Blinken 3. Aus)
Menü5 Die Details zum Relaisinhalt. (Das Anzeigelicht war die grüne LED. Die Anzeige-LED hat drei Zustände: 1. EIN 2. Blinken 3. Aus)
Menü6 Barriere- oder Funktionsinhaltsdetails (Das Anzeigelicht war die grüne LED. Die Anzeige-LED hat drei Zustände: 1. EIN 2. Blinken 3. Aus)
So programmieren Sie JUTAI-Radar
Der erste Schritt: Eingabe: Drücken Sie die Funktionstaste (nicht loslassen), bis die einzustellende Menünummer ausgewählt ist und lassen Sie die Taste los, die entsprechende Parameterleuchte leuchtet auf.
Der zweite Schritt: Parameter ändern: Ändern Sie den aktuellen Parameter mit der Jog-Funktionstaste.
Der dritte Schritt: Parameter speichern: Drücken Sie häufig die Funktionstaste und lassen Sie dann die roten Kontrollleuchten 1, 2 und 3 los, die gleichzeitig blinken. Die Parameter werden geändert und gespeichert.
Schnelleinstellung:
1. Einstellungen für die Anwendung auf gerader Fahrspur (nur 2 Schritte erforderlich). Der erste Schritt: Stellen Sie die Anwendungsszene auf den geraden Stabmodus ein (Menü6). Der zweite Schritt: Stellen Sie den Erkennungsabstand ein (Menü1).
2. Anwendungseinstellungen für Zaunpfahlbarrieren (nur 3 Schritte). Der erste Schritt: Stellen Sie das Anwendungsszenario auf den Zaunmodus ein (Menü 6). Der zweite Schritt: Stellen Sie den Erkennungsabstand ein (Menü 1). Der dritte Schritt: Die Bremsgeschwindigkeit wird auf 1 Sekunde festgelegt (Menü 3).
3. Anwendungseinstellungen für den Triggermodus (nur 3 Schritte erforderlich). Der erste Schritt: Stellen Sie das Anwendungsszenario auf den Triggermodus ein (Menü). Der zweite Schritt: Stellen Sie den Erkennungsabstand ein (Menü1). Der dritte Schritt: Legen Sie die Antwortausgabemethode fest (Menü5).
Radarwarnereinstellungen optimieren (Einstellungselemente auswählen)
1. Empfindlichkeitseinstellung: Die empfohlene Einstellung für Elektrofahrzeuge ist mittel oder niedrig und die Einstellung für den Fußgängerdurchgang ist mittel oder hoch. Bei Aufnahmen können Sie einen in der Mitte und den anderen hoch oder niedrig einstellen.
2. Einstellung zur Unterscheidung von Fußgängern und Fahrzeugen: (Es wird dringend empfohlen, die Unterscheidung zwischen Mensch und Fahrzeug in nicht notwendigen Situationen festzulegen.) Durchfahrt für Elektrofahrzeuge oder Fußgängerdurchfahrt sollte auf „Keine Unterscheidung zwischen Fußgängern und Fahrzeugen“ eingestellt werden. Ansonsten. Bitte stellen Sie die „Unterscheidung zwischen Fußgänger und Fahrzeug“ ein, um Unfälle durch vorbeifahrende Personen zu verhindern.
1. GeradeausfahrmodusNach dem Anheben des Bremshebels löst die Handfläche das Radar aus nächster Nähe aus und das Tor schließt sich nach dem Verlassen automatisch. Innerhalb des eingestellten Erkennungsabstands prallt der Bremshebel zurück, wenn sich der menschliche Körper dem Bremshebel nähert. Der Bremshebel kann automatisch einrasten, wenn der menschliche Körper weit vom Bremshebel entfernt ist. (Wird verwendet, um den Schließgeschwindigkeitsparameter von Hochgeschwindigkeitstoren zu ändern). Die Reaktionsgeschwindigkeit des Radars kann angepasst werden.
2. Zaunspurmodus: Wenn das ferngesteuerte Tor wiederholt geöffnet und geöffnet wird, löst der Zaun das Radar nicht aus. Nach Abschluss erfolgt der Test auf die gleiche Weise wie bei der oben genannten geraden Spur. (Wenn das Radar eines der oben genannten Links durch den Zaun selbst aktiviert wird, befolgen Sie bitte Abschnitt 12 „Beseitigung allgemeiner Fehler, Regel 1“).
3. TriggermodusBeziehen Sie sich auf die Debugging-Methode des Straight-Lane-Modus.Allgemeine Fehlerbehebung
1. Das Radar wird beim Öffnen oder Schließen vom Zaun selbst ausgelöst. 1.1 Überprüfen Sie, ob der Abstand zwischen Radar und Zaunmitte den Anforderungen entspricht und ob die Radarinstallationsfläche senkrecht zum Zaun steht. Bitte passen Sie die Installationsposition an oder fügen Sie an der Seite des Radars in der Nähe des Zauns einen 2-4-mm-Abstandshalter hinzu. 1.2 Ob die eingestellte Öffnungsgeschwindigkeit größer ist als die tatsächliche Schließgeschwindigkeit. 1.3 Unabhängig davon, ob zwischen Personen und Fahrzeugen unterschieden wird, kann die Empfindlichkeit um eine Stufe gesenkt werden, wenn eine Unterscheidung zwischen Personen und Fahrzeugen erforderlich ist.
2. Die Radarausgabe wurde nicht zurückgesetzt. Der eingestellte Abstand ist größer als die Fahrspur oder es wurde ein Fremdkörper auf dem Boden erkannt. Oder das Radar ist nicht vertikal installiert. Wenn Sie das Problem nach der Fehlerbehebung immer noch nicht lösen können, rufen Sie bitte Menü 2 auf (wenn die 3 grünen Lichter gleichzeitig blinken, drücken Sie die Funktionstaste und gehen Sie direkt zu „Radar-Initialisierung“). Nachdem die Initialisierung abgeschlossen ist, schalten Sie das Gerät bitte erneut ein.
3. Die drei Lichter leuchten immer, nachdem das Radar eingeschaltet wurde. Das Radar ist initialisiert und funktioniert nach wiederholten Neustarts immer noch nicht. Bitte senden Sie es zur Inspektion ins Werk.
4. Die angezeigten grünen Lichter Nummer 1 und Nummer 3 blinken. Wenn das Radar erkennt, dass das Tor ausgelöst wurde. Wenn das Tor geschlossen ist oder am Rand des X-Strahls ein Rückprallsignal vorhanden ist, kann das Radar nicht unterscheiden. Wenn es sich um einen Zaun oder ein Fahrzeug handelt und das Tor geschlossen wird, nachdem das Tor geöffnet wurde, oder wenn nach dem Verschwinden des Signals keine Fahrspur mehr vorhanden ist. Dabei handelt es sich um einen Sicherheitsmechanismus, der ein Einschlagen des Fahrzeughecks verhindert und keine Eingriffe erfordert.


